LE BRAS BIONIQUE
LE BRAS BIONIQUE

Voici une vidéo de présentation ICI
Sensibilité du touché
Manœuvrer une prothèse le plus naturellement possible après l’amputation d’un membre est complexe.
Pour une utilisation la plus complète possible, il est aussi important de retrouver la capacité de mouvement que la sensation du toucher, celle-ci étant l’un des sens les plus compliqués à reproduire en robotique.
Cette prouesse technologique a put être réalisée par les chercheurs de l’agence de recherche et développement du département américain de la Défense (Darpa).
C’est en greffant des électrodes aux résidus de nerfs du membre amputé que le porteur de la prothèse peut recouvrer le sens du toucher.
Associé à la technique de « réinnervation musculaire ciblée », le procédé aide la personne à bouger son bras artificiel de façon presque naturelle.
Une utilisation importante dans la robotique :
Développé par des chercheurs américains, le capteur BioTac, avec ses électrodes et ses détecteurs, imite le bout d’un doigt. Associé à un logiciel, il peut sentir le chaud et le froid, déterminer la texture et la forme d’une surface ou d’un objet. Une innovation qui ouvre la voie à la création de prothèses d’un nouveau genre mais qui est aussi utilisée pour les robots industriels.


Main robotique avec deux capteurs Biotac fixés au pouce et à l’index
Un robot équipé de capteurs tactiles et capable d’identifier des textures avec une précision parfois supérieur à celle des humains.
Il reproduit les capacités sensorielles du doigt, sa forme et sa texture.
Sa structure est faite d’une coque dans laquelle sont placées plusieurs sortes de capteurs (pression, thermique, électrodes) qui vont récolter les informations.
Cette structure est enrobée d’un revêtement en silicone qui simule la peau en reproduisant les microsillons des Empreintes digitales.

Microsillon d’un doigt naturel
Entre la coque et la peau en silicone, un fluide conducteur électrique va faire l’interface.
Résultat, BioTac parvient à rassembler les propriétés mécaniques et les capacités sensorielles d’un doigt humain.

Lorsqu’elle entre en contact avec un objet extérieur, la peau du capteur se déforme et fait alors circuler le fluide autour des électrodes.
L’effet produit sur les différents capteurs permet de déterminer le point de contact et la forme d’un objet : les bords, les coins, les surfaces planes et même les courbures.
Détecter la chaleur:
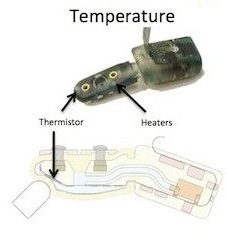
On utilise des capteurs thermiques et des thermistances (ces capteurs sont basés sur la loi de la variation de la résistance électrique en fonction de la température) pour détecter la température.
Le robot peut ainsi déterminer que le métal est plus froid que le bois, comme peut les faire un humain.
Pour détecter la température d’un objet, le système se sert de la chaleur dégagée par l’électronique embarqué dans le capteur pour chauffer le doigt au-delà de la température ambiante, comme c’est le cas pour un doigt humain.
Une thermistance qui court sous la peau en silicone va alors mesurer la différence de température entre la surface du capteur et celle de l’objet et en déduire s’il est chaud ou froid.
Détecter des textures :
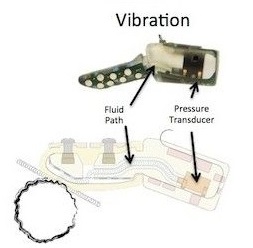
Lorsque le doigt du robot frotte une surface, les microsillons du revêtement produisent des vibrations qui sont enregistrées par le capteur de pression.
Cela permet au système de distinguer avec beaucoup de précision les nuances entre différentes textures.
Toutes les informations récoltées ont besoin d’être interprétées pour qu’une information puisse en sortir, c’est le rôle d’un algorithme.
Dans le processus du toucher, les humains explorent un objet avec un certain nombre de mouvements qui sont déterminés par rapport à leur expérience passée.
De chaque mouvement résulte une information qui va décider quel sera le mouvement suivant à effectuer pour récolter une autre information et ainsi de suite jusqu’à obtenir assez de données sur un objet ou une surface.
L’algorithme associé à BioTac imite cette approche en déterminant quel est le prochain mouvement exploratoire à effectuer.
Le robot stocke en mémoire des textures et propriétés d’objets rencontrés auparavant.
Lorsqu’il est confronté à une texture inconnue, il puise dans sa mémoire pour déterminer le niveau de similitude avec ce qu’il touche.
Cette information est alors utilisée pour décider quel sera le mouvement suivant à effectuer. En moyenne, il faut 5 mouvements exploratoires pour identifier une texture avec un taux de réussite de 95,4 %.
Les utilisateurs de ces prothèses équipées de capteurs témoignent comme l’Américain Igor Spetic, 48 ans, qui a perdu sa main droite depuis 4 ans : « Je n’ai rien ressenti d’autre que de la douleur durant deux ans. Mais la nouvelle sensation était fantastique. C’est comme si ma main marchait vraiment, que je n’avais pas de prothèse. C’est aussi proche de la réalité que cela pourrait l’être pour moi. »
Désormais, ces utilisateurs peuvent empoigner une bouteille en plastique sans l’écraser et se servir eux mêmes ou encore attraper délicatement une tomate cerise sans l’abîmer.
Ils affirment que, grâce à cette nouvelle prothèse, ils ne montrent plus de mouvements involontaires comme c’était le cas avant.
Un important bonus encore, la sensation de bras fantôme liée à l’amputation a quasiment disparu !
Les résultats sont prometteurs mais les possibilités sont encore limitées, de même que les sensations perçues.
Le système ne permet pas encore à ceux qui l’ont testé de l’utiliser chez eux car les capteurs sont reliés de façon externe au reste du dispositif.
C’est pourquoi les chercheurs travaillent actuellement à concevoir un système plus intégré, ils pensent que d’ici 5 à 10 ans il sera complètement implanté.
Reconnaissance du poids des objets
Le plus grand défis consiste à mettre au point un algorithme capable de gérer la préhension en ajustant la pression selon ce qui est saisi.
En effet, une prothèse sans cette capacité reste difficile à utiliser dans la vie courante, le sujet ne se rendant pas compte de la force qu’il exerce.
Celui ci peut alors, si il ne regarde pas attentivement ce qu’il fait, déformer, briser les objets ou encore blesser une personne (comme lorsqu’il veut lui tenir la main, par exemple).
Dans les capteurs Biotac, on retrouve des capteurs de pression.
Ces capteurs (aussi appelés capteurs de force) réagissent à la pression, donc au contact ou au poids. Ce sont des dispositifs utilisés pour convertir une force appliquée sur un objet en signal électrique.
Lorsque ces capteurs sont déformés, ils envoient un signal à un algorithme qui va calculer l’intensité de la pression exercée. On utilise ces dispositifs dans de nombreux domaines comme le tactile ou les balances électroniques.

 Réinnervation des muscles amputés
Réinnervation des muscles amputés
Pour commencer, il faut rappeler que c'est notre cerveau qui est à l'origine des mouvements de notre corps.
En effet, il envoie des signaux électriques aux nerfs qui les transmettent aux muscles.
Chez les personnes amputées, cette liaison n'existe plus et c'est ce que les scientifiques ont tenté de rétablir grâce à l'invention du bras bionique.
Les signaux nerveux sont captés par une puce située dans la prothèse grâce à la transplantation de nerfs dans la poitrine d'un patient.
Les moteurs du bras bionique sont donc commandés par des signaux myoélectriques envoyés par le cerveau aux muscles réinnervés à proximité du membre amputé.
En fait, même si un membre est absent, le cerveau n'oublie pas ce qu'il pouvait effectuer. Il s'agit du principe de "mémoire de procédure".
L'implantation d'un bras bionique recourt à la technique de réinnervation musculaire ciblée, ou TMR (Targeted Muscle Reinnervation), qui capte les impulsions myoélectriques, traduisant l'intention de mouvement du patient.
Le Dr Kuiken a déclaré que lors d'une opération, les chirurgiens utilisent les nerfs restants dans le membre amputé et utilisent les muscles comme amplificateur biologique, c'est-à-dire qu'ils s'en servent pour dérouter les informations nerveuses afin qu'elles puissent être captées par le bras bionique.
Afin de pouvoir restaurer la mobilité du membre, les prothèses bioniques doivent exercer un contrôle cognitif sur les fonctions motrices restantes.
Cette condition dépend de l'état du patient.
En effet, s'il possède des liaisons nerveuses en bon état sur sa zone amputée, il peut apprendre à contrôler les mouvements du bras bionique.
En revanche, une opération chirurgicale est nécessaire si les liaisons nerveuses sont trop abîmées : c'est la TMR.
Cette opération permet de détourner les nerfs moteurs du moignon vers d'autres muscles.
Ainsi, dans le cas de l'implantation d'un bras bionique, les nerfs du moignon sont connectés aux nerfs moteurs des muscles thoraciques.
Grâce à la TMR, lorsque le patient décidera de bouger sa prothèse, la commande motrice, émise par le cerveau et véhiculée par les nerfs du moignon déroutés, provoquera la contraction musculaire de la zone pectorale réinnervée.

Vous devez être connecté pour poster un commentaire